Teacher Version
Smarter Maze Solver
Creating a smarter maze solver
The program shown in the video from Looped decisions is simple. The robot's performance is limited. Change your code to add new, useful features!
Virtual Robot: SmarterSolverVR.rbg
Physical Robot: SmarterSolver.rbg
Enhance your program by adding the following features:
LED Feedback
- Output green to the Brick LED any time the robot is moving forward.
- Output red to the Brick LED any time the robot is turning right.
Limited Duration
- The robot may get stuck. Make the program end after it has performed 10 moves in total.
Now, you can tell when your robot sees an object/wall by observing the color of its LEDs. Additionally, if the robot gets stuck, it will eventually stop since it is programmed to make 10 moves.
Tiles Maze
Physical Robot: TiledMaze.rbg
Virtual Robot: TiledMazeVR.rbg
- Build a maze for the robot, made up of square floor tiles. (If you don't have floor files, use 30 cm squares).
- Make sure you adjust your rotation to go one tile, not 0.5 rotations.
- Use folders or boxes to make sure the robot can recognize the walls.
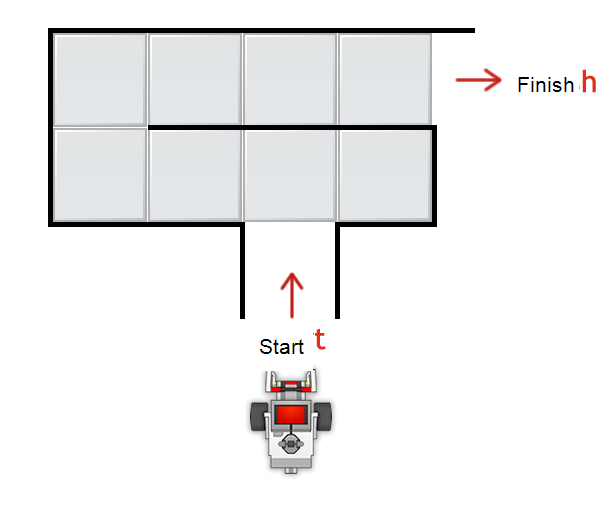
Though it may not look that way, the sample maze shown above can be solved using only right turns. Give this challenge a try, and see what happens. Remember to stay patient with your robot.